| 観測機材 |
天体望遠鏡BORG100ED+マルチフラットナー1.08DG(部分食撮影のためND400を1枚、ND8フィルターを2枚使用、口径82ミリ)
カメラ 日食撮影用にEOS5D markⅡ、日食時の風景撮影用にEOS1Ds MarkⅢ、EF16-35mm F2.8LⅡUSM、EF24-70mm
F2.8LⅡUSM |

観測のために持っていった機材 |

スーツケースに梱包した状態(右側に機材、左側に衣類) |

使用したスーツケース |
スーツケースは、新素材を使用した世界最軽量のものです。重量は2.6キロ。サムソナイト製のコスモライト・スピナー75です。それまで愛用していたスーツケースが、経年劣化しキャスターが壊れたため、購入しました。
キャスターは、とてもなめらかで、空港などで運搬しても負担を感じません。
上とサイドについているハンドル(取っ手)は、これだけの機材の重量を支えられるのか不安でしたが、問題ありませんでした。
機材と衣類を入れた状態での、スーツケースの重量は、50ポンド(22.7キロ)です。機内預け入れ荷物の重量制限ぎりぎりでした。 |

当日の観測地の様子です。地平線近くの雲は朝のみ。 |

前日観測地を下見した時の写真です。 |

日食当日の、夜明け前にセッティングした望遠鏡
遠方に見える山は、グランド・ティートン(4197m) |

別の角度から見た望遠鏡 |

パソコンを使用して、撮影は全自動撮影としました。 |

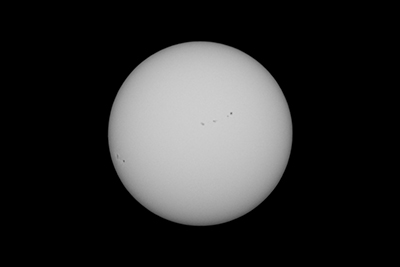
この写真を見れば、当日の天気が良くわかるでしょう。 |
|
| 日食の全経過 |
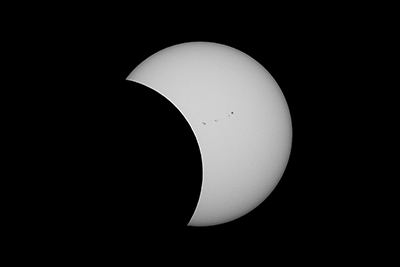
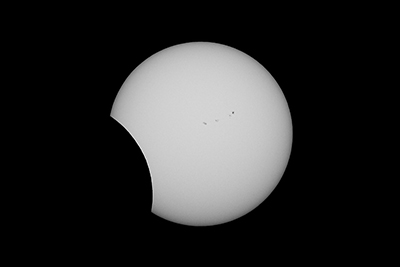
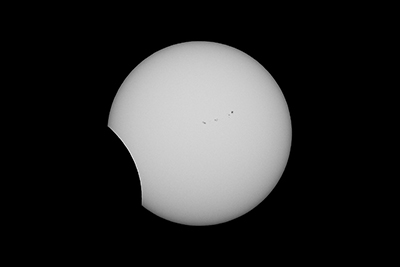
以下の画像は日食の全経過です。(画面上で、左から右、右から左下の順で時間が経過します。時刻は世界時です。)
共通データ 望遠鏡 BOEG100ED F6.4 ×マルチフラットナー1.08DG カメラ EOS5D MarkⅡ ND400+ND8+ND8(口径82ミリ) ISO100
画像は天の北極を上にしています。すなわち、上が北、下が南、左が東、右が西です。太陽の西側から欠けていきます。 |
16h15m 1/3000sec 食分0.000 |

16h20m 1/3000sec 食分0.048 |
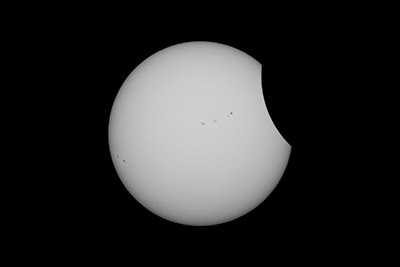
16h25m 1/3000sec 食分0.114 |
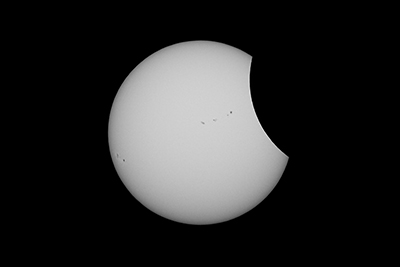
16h30m 1/3000sec 食分0.180 |

16h35m 1/3000sec 食分0.246 |

16h40m 1/3000sec 食分0.312 |

16h45m 1/3000sec 食分0.377 |
16h50m 1/3000sec 食分0.441 |
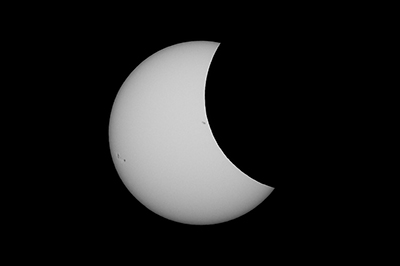
16h55m 1/3000sec 食分0.505 |

17h00m 1/3000sec 食分0.569 |
17h05m 1/3000sec 食分0.633 |
17h10m 1/3000sec 食分0.696 |
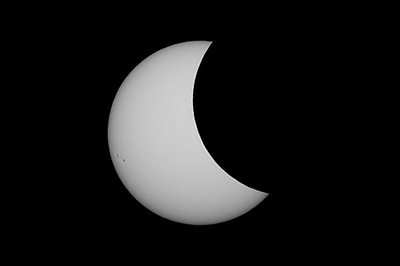
17h15m 1/3000sec 食分0.759 |
17h20m 1/3000sec 食分0.822 |
17h25m 1/3000sec 食分0.885 |
17h30m 1/3000sec 食分0.947 |
 IMG_8769.jpg)
第2接触時のダイヤモンドリング(第2接触5秒前)
17h34m15s 1/500sec |
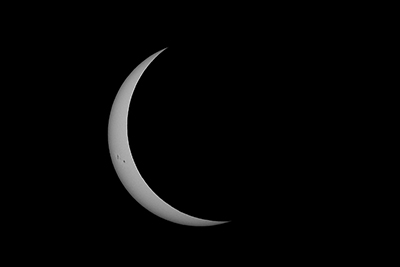
 IMG_8789.jpg)
第2接触直後の彩層(画面左側のピンク色の部分)とプロミネンス
17h34m35s(第2接触15秒後) 1/500sec |
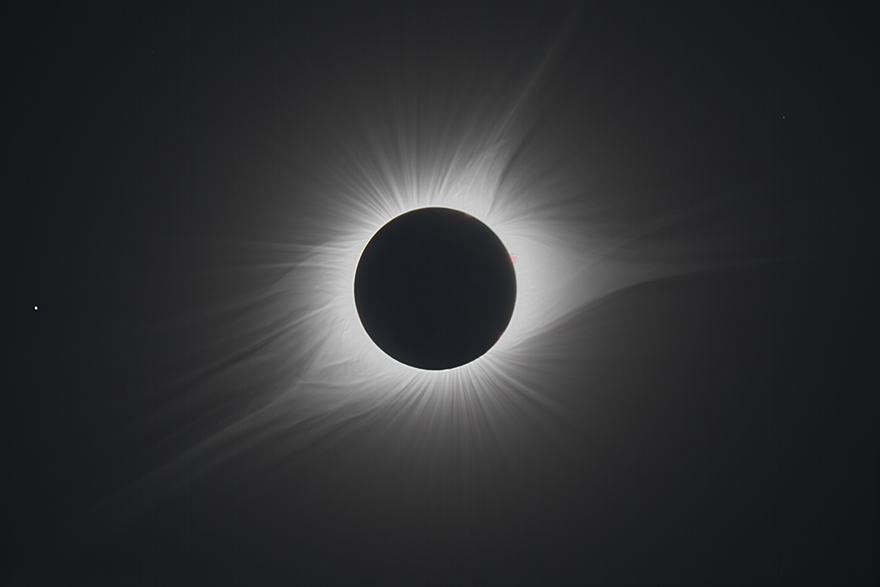
太陽コロナ
皆既中に撮影した27枚の画像をphotoshop CS6およびステライメージ8で画像処理 1/500 から 2secまでの多段階露光。R-USM法、フラット補正。
エクリプスナビゲーターVer.3による全自動撮影
当日、肉眼(肉眼、ニコン8×30双眼鏡、7×50ファインダー)で見た太陽コロナの印象に近づけるように、画像処理しました。
画面左側に見えている恒星は、しし座のレグルスです。 |

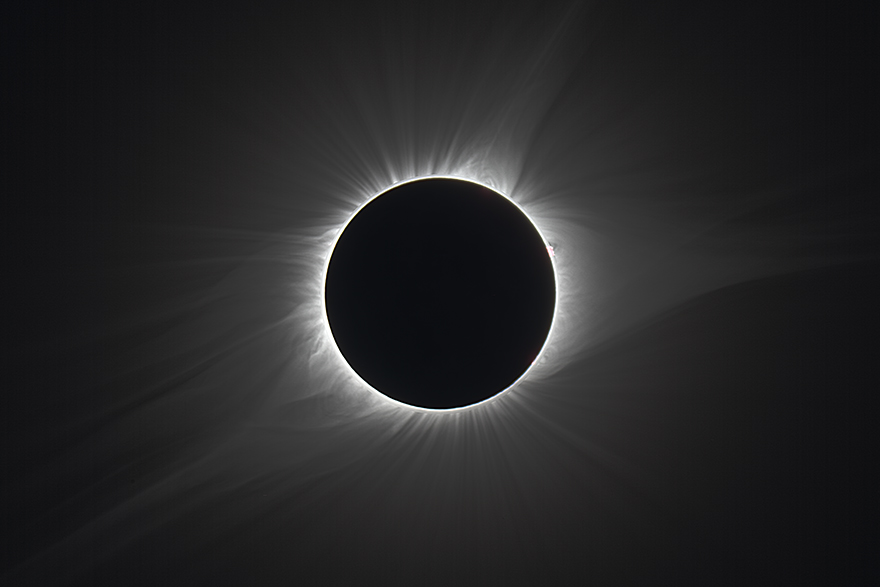
ステライメージ8.0Cに追加された回転アンシャープマスク機能を使用して処理した画像です。パラメーターを調整することにより、内部コロナのディテールをさらに抽出することが可能ですが、肉眼で見たイメージに近づけるように、パラメーターを調整しました。結果、上の画像と同じような画像となりました。プレビュー画像を見ながら調整ができるため、このソフトで処理したほうが、有利かもしれません。ただし、処理速度の遅いパソコン向きではありません。 |

コンポジット(画像の加算合成)の枚数を14枚に減らして、パラメーターを調整して内部コロナのディテールを強調したものです。枚数が多い方が滑らかに仕上がるように思います。ただし、枚数が多いと、撮影する時間も長くなり、その間の月の移動量が無視できなくなります。バックグラウンドのノイズを減少させることが、当面の課題です。
上の3枚の画像を比較すると、photoshop CS6で処理した画像が、肉眼で見た感じに、一番近いように思います。(この画像に限り、周辺部を少しトリミングしています。) |
ステライメージ8.0Cで処理した画像(2枚上の画像)をトーンカーブ処理して、内部コロナを強調しました。周辺部をトリミングしています。 |

皆既日食のスケッチ
皆既日食の観測終了後、ホテルに戻り、肉眼(肉眼、ニコン8×30双眼鏡、7×50ファインダー)で見たコロナの印象を、カメラで撮影した画像と照らし合わせながらスケッチしたものです。 |
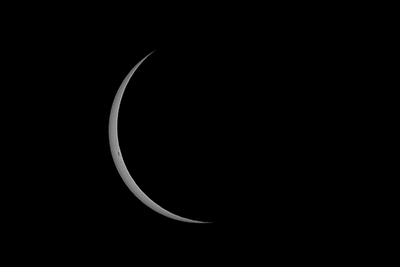
 IMG_8816.jpg)
第3接触直前の彩層(画面左側のピンク色の部分)とプロミネンス
17h34m34s(第3接触1秒前) 1/500sec |
 IMG_8833.jpg)
第3接触直後のダイヤモンドリング
17h36m39s(第3接触3秒後) 1/500sec |
17h40m 1/3000sec 食分0.959 |
17h45m 1/3000sec 食分0.898 |
17h50m 1/3000sec 食分0.837 |
17h55m 1/3000sec 食分0.776 |
18h00m 1/3000sec 食分0.715 |
18h05m 1/3000sec 食分0.654 |
18h10m 1/3000sec 食分0.594 |
18h15m 1/3000sec 食分0.534 |
18h20m 1/3000sec 食分0.473 |

18h25m 1/3000sec 食分0.413 |

18h30m 1/3000sec 食分0.354 |

18h35m 1/3000sec 食分0.294 |

18h40m 1/3000sec 食分0.234 |
18h45m 1/3000sec 食分0.175 |
18h50m 1/3000sec 食分0.115 |

18h55m 1/3000sec 食分0.056 |
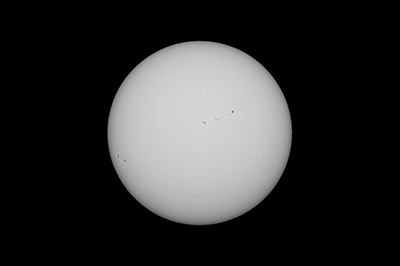
19h00m 1/3000sec 食分0.000 |
|
|
| 日食観測中に気が付いた点 |
1 太陽コロナは、北西方向と、西方向、および東南の方向に伸びた3本のストリーマーが顕著でした。肉眼でもよく見えていました。
2 双眼鏡の視野の中に、コロナとともに、しし座のレグルスが認められました。
3 金星は、皆既食が始まる、比較的前から認めることができましたが、水星と火星は見つけることができませんでした。
4 皆既中は、太陽の方向の地平線は、赤みが少なく、西側の地平線付近は、赤く染まっていました。
5 地面が、芝生のような草が生えていたため、シャドーバンドを見ることはできませんでした。
6 当日は、気流の状態が、思ったほどよくありませんでした。
7 ニコン8×30双眼鏡では、手振れして、プロミネンスが判別できませんでした。7×50のファインダーで良く見えていました。
|
| トラブル |

|
 |
夜明け前に、天の北極に向け極軸を合わせました。日の出後に望遠鏡を太陽の方向に向けて、固定しようとしたときに、固定用のクランプネジが折れてしまいました。「ヒエー!」「こんな大事な場面で・・・」、ドライバーを押し付け、少し回して固定しましたが、だめでした。応急処置として、駆動用のバッテリーを養生テープで、望遠鏡の反対側に固定し、バランスを調整しました。
|
折れてしまったクランプネジです。 |
| 旅行中のスナップ |
 |

|
| ソルトレイクシティの空港のバゲージクレームエリアです。ツアー参加者の何人かの荷物が出てきませんでした。間違って次の便に行ってしまったようでした。荷物が出てくるまで、約1時間待ち! |
ソルトレイクシティから、宿泊地であるジャクソンホールへ。移動距離約500キロ。約6時間、延々とこのような景色が続きます。 |

宿泊地となった、イン・アット・ジャクソンホール |

日食観測の拠点となったジャクソンホールの中心部 |
 |
 |
| ジャクソンホールでは、馬に乗って交通整理をしていました。珍しいので、許可を得てカメラを向けました。 |
アンテロープ・フラットロード。映画「シェーン」のエンディングの舞台です。後方に控えるのは、主峰グランド・ティートン |
 |
| ジャクソンレイクからグランド・ティートン国立公園パノラマ |
 |
| ジェニーレイクから主峰グランド・ティートン(写真左側の尖った山)を望む |
|
| エクリプスナビゲーターVer.3による、日食の全自動撮影 |
 私共は、若い頃からプラネタリウム関連の仕事に携わるかたわら、天文計算の勉強をしてきました。プラネタリウム解説者としてのスキルアップが目的でした。基本的な天文計算をはじめ、彗星の位置推算、軌道決定、惑星の軌道計算などを経て、最終的には、日食計算論へと進みました。 私共は、若い頃からプラネタリウム関連の仕事に携わるかたわら、天文計算の勉強をしてきました。プラネタリウム解説者としてのスキルアップが目的でした。基本的な天文計算をはじめ、彗星の位置推算、軌道決定、惑星の軌道計算などを経て、最終的には、日食計算論へと進みました。
のちに、天文に特化したプログラム開発を行っている、アストロアーツさんにお願いして、これらの計算のノウハウを引き継いでいただくことにしました。ソースプログラムと計算のノウハウを提供して誕生したのが、エクリプスナビゲーターです。2005年頃だったと記憶しています。
エクリプスナビゲータは日食を高精度に計算するソフトウエアです。中でも、皆既日食時にみられる、本影錐の移動のシュミレーションの機能を持たせたのは、当時としては世界初です。この件については、ソフトウエア発売時にはアピールしませんでしたが、私共のオリジナルの計算式を使用しています。
エクリプスナビゲータは、バージョン3となり、2017年6月21日(水)に発売になりました。バージョンを重ねるごとに機能が充実してきましたが、今回は、日食撮影時の、カメラの自動撮影機能が搭載されました。皆既日食の撮影時には、カメラの操作に神経を使うため、観測者は、実は、皆既中の太陽コロナや、ダイヤモンドリングをよく観測している時間がありません。自動撮影機能が搭載されたことで、眼視で観察することに集中できるため、大変助かります。
私共も、今回は、この自動撮影機能を使用することにしました。ツアーに参加する前に、充分なテスト撮影を重ね、本番に臨みました。本撮影モードは、当日のみ機能するので、パソコンの時計を当日に進めて、出発前に何度かテストを重ねました。しかし、実際には、当日、本撮影モードに入ることができませんでした。おそらく、日付か時刻設定が誤っていたものと思われます。
気が付いたのは、部分日食の開始直前でしたので、原因を特定している時間がありませんでした。テスト撮影モードに入り、実際の時計と、テスト撮影開始の時間のタイミングを合わせることにより、対応しました。実際の時刻よりも、2秒程度遅れて、各撮影を行いましたが、余裕を持たせていたため、問題は生じませんでした。パソコンのバッテリーを長持ちさせるために、液晶画面を暗めに設定していたことも、原因特定に手間取った要因となりました。
全自動撮影を行うことで、日食の始めから終わりまで、肉眼や双眼鏡で、充分に観測できたのは、ありがたいことです。自らが提案したソフトウエアに支援されて、日食を観測できたことに感慨深いものがありました。右上の写真は、出発前に、カメラとパソコンの動作チェックを行っているところです。
|
| エクリプスナビゲーターの計算精度と実際の観測との誤差について |
皆既日食や金環日食において、全自動撮影が行えるようになると、重要になるのが、計算の精度と、実際の撮影における誤差の問題です。エクリプスナビゲーターの精度は、当時、NASAが発表する各地点の局地予報に対して、0.1秒の精度で計算が一致するよう、各パラメーターや計算方式を合わせてあります。
計算は、平均月縁を想定して進められます。皆既日食の場合は、実際には、月縁の凹凸があるため、平均月縁で算出した計算結果を、凹凸で補正しなくてはいけません。この部分の計算は、アストロアーツの開発スタッフにより実現されました。皆既日食における全自動撮影では、この月縁の凹凸を配慮した計算結果にもとづいて、撮影計画を立てる必要があります。
今回の日食で、アストロアーツのスタッフが、同社のホームページに発表した動画では、観測者たちのカウントダウンが聞こえていました。エクリプスナビゲーターの計算結果を根拠にしているものと思われます。その声と、動画の第2接触、第3接触時刻は、見事に一致していました。GPSが個人レベルで使用できるようになったことも、これに貢献しているものと思われます。以前は、地図上から観測地の座標を特定しなくてはいけませんでしたが、観測場所により、地図からの座標測定は、誤差を生じます。
ただし、私共が撮影した画像を見ると、今回の日食の第3接触で、0.5秒程度の誤差が生じている可能性があります。各接触時刻は、プロの研究者の場合、実際に、接触時刻の測定を行い、計算との誤差の結果を、軌道計算に反映させていると思われます。しかし、エクリプスナビゲーターの計算の目的は、あくまでも、観測の支援ツールです。このレベルであれば、実用上、問題はないと考えます。
なお、皆既日食、金環日食を観測する場合、その観測場所によっては、計算誤差を生じることを理解しておかれると良いと思います。皆既帯および金環帯の端点(日の出にとともに皆既食あるいは金環食が始まる場所の近く、日没とともに皆既食あるいは金環食が終了する場所の近く)、皆既帯の北限界線上、南限界線上、金環・皆既日食などでは、計算誤差が大きくなりますので、ご注意ください。プログラム上の問題ではなく、月の本影の移動速度が極めて速かったり、金環・皆既帯の幅が極端に狭かったり、限界線上でのGPSの精度の問題など、さまざまです。
エクリプスナビゲーターに組み込んだ、本影錐の移動のシミュレーションに関して、ツアーの参加者から質問がありました。本影錐は、観測者の上空5000メートルに投影されるものと仮定して、計算を進めていますが、観測者の標高が2000メートルもある場合は、どうなるのかというものでした。プログラムでは、観測者の標高+5000メートルで計算をしています。
本影錐が観測者の上空5000メートルに常に投影されるかどうかは、はっきりした根拠はありません。だいぶ以前に発表された、理科大隊のレポートに基づく数値です。当日の気象条件、その他の条件により、投影される高度はさまざまでしょう。あくまでも、本影錐の動きを把握するためのシミュレーションであることをご理解ください。
計算の流れは、観測者の座標とともに、上空5000メートルの本影の輪郭の各点の座標を計算します。それを観測者から見る、高度・方位角に変換するものです。第2接触時には、本影錐の最初のエッジの部分がダイヤモンドリングにかかっています。また、第3接触時には、本影錐の後ろ側のエッジがダイヤモンドリングにかかっています。晴れている場合、観測者の目線は、太陽に集中するので、この状況を目撃するのは困難でしょう。
|
| 失敗談 |
1 皆既日食時に太陽を含む、地上の景色を撮影するのを忘れてしまいました。構図を決め、ピントも出して、あとは、インターバル撮影のスタートボタンを押すだけにしていましたが、ダイヤモンドリングや、太陽コロナのあまりの美しさに見とれてしまい、ボタンを押すのをすっかり忘れてしまいました。皆既食が終わった時点で、カメラ(EOS1Ds MarkⅢ)を見て、「アーッ!やってしまった・・・」。
2 極軸クランプのトラブルは、上記で記述した通りです。部分食の始まる直前だったため、気が動転してしまいました。
3 エクリプスナビゲーターで、本撮影モードに入れなかった件も、前述のとおりです。前の晩に、充分にチェックしていたので、いまだに謎です。
4 昨年、グァム島沖で撮影した写真に比較すると、ダイヤモンドリング、コロナとも、ピントがごくわずかに甘かったようです。部分食の間に、数回ピントをチェックしています。自動撮影で連写を行った際の、振動が影響しているのかも知れません。接眼部を強化し、NDフィルターを外した際のピントのずれなどに関して、再検討したいと思います。今回は、気流の状態が良くなかったので、その影響があったのかも知れません。
|
| 次回の日食に向けて |
| 次の日食に参加できるかどうか、私共の年齢を考えると、どうなるかわかりません。しかし、もしツアーに参加できた場合には、上記の失敗を踏まえて、さらに質の高い撮影ができるように考えています。 |